Abbiamo già discusso di cos’è e di come si costruisce il Datum Reference Frame (DRF). Il caso in esame presentava un componente semplice con tre superficie nominalmente ortogonali tra loro. Abbiamo visto come vincolare la parte creando un sistema di riferimento associato alle datum features.
Complichiamo ora la creazione del datum reference frame stesso, considerando una delle datum feature inclinata rispetto alle altre due datum features.
Avendo una datum feature inclinata, si avranno ripercussioni sul datum reference frame?
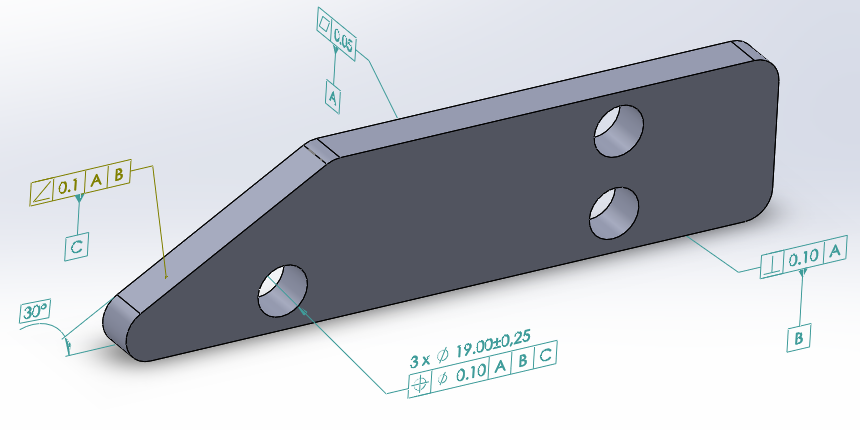
Vediamo assieme step by step come si costruisce il datum reference frame del componente in figura 1.
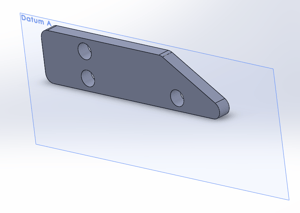
Il Datum primario A che consideriamo è la superficie posteriore alla vista, figura 2. Il datum A coincide con la datum feature.
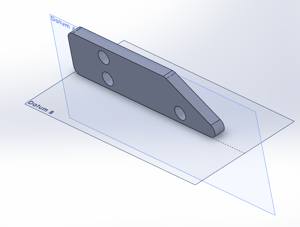
Il Datum secondario B è la superficie inferiore del componente, nominalmente ortogonale al datum A. Di nuovo il datum B coincide con la datum feature, figura 3. 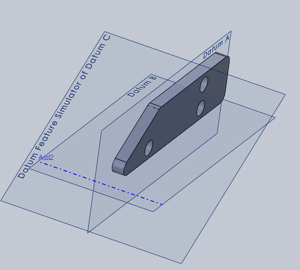
Infine introduciamo il Datum terziario C. Si sceglie come superficie per il datum C la superficie inclinata di 30° rispetto al Datum B.
Da figura 4 si vede che, selezionando la superficie inclinata come riferimento per il datum terziario, si sta definendo tale superficie come theoretical datum feature simulator del datum C, inclinata nominalmente a 30°.
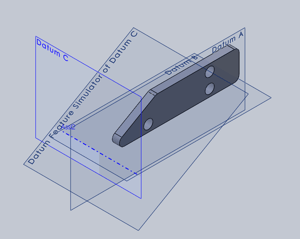
Il datum terziario è costruito con orientamento sempre ortogonale rispetto al datum A e B, e con angolo di 60° rispetto alla datum feature C. In questo modo si riottiene un sistema di piani mutuamente ortogonali, figura 5.

La differenza con il caso precedente è che l’origine del sistema di riferimento è staccato dal corpo: infatti, si ha sempre il datum C ortogonale ai datum A e B, ed inoltre il datum C è passante tra l’intersezione tra il datum B e la datum feature C, come in figura 6, ponendo quindi l’origine del sistema di riferimento separata dal componente, cosa che non accade quando datum feature e datum coincidono.
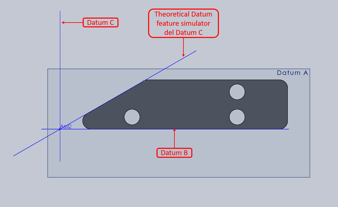
Per quotare correttamente il componente, volendo considerare anche i tre fori si ha (figura 1):
- Tolleranza di planarità sul datum A
- Tolleranza di ortogonalità sul datum B rispetto al DRF A
- Angolo tra datum B e datum feature C indicato con la Basic Dimension (ASME) o TED (ISO)
- Tolleranza di angolarità sul datum C rispetto al DRF A|B
- Localizzazione dei tre fori rispetto al DRF A|B|C
Se ti interessa saperne di più sulla gestione delle tolleranze per scoprire come applicarle al vostro processo di progettazione contattaci, uno dei nostri esperti risponderà a tutte le tue domande.
